NeuroFeel
Project Date: Ongoing
1. Problem and Motivation
Existing tactile sensors are limited in dynamic responsiveness, real-time tracking, and effective force feedback, particularly in applications requiring both sensitivity and robustness. This project aims to address these gaps by leveraging event-based vision systems and biomimicry of mechanoreceptors.
2. Design
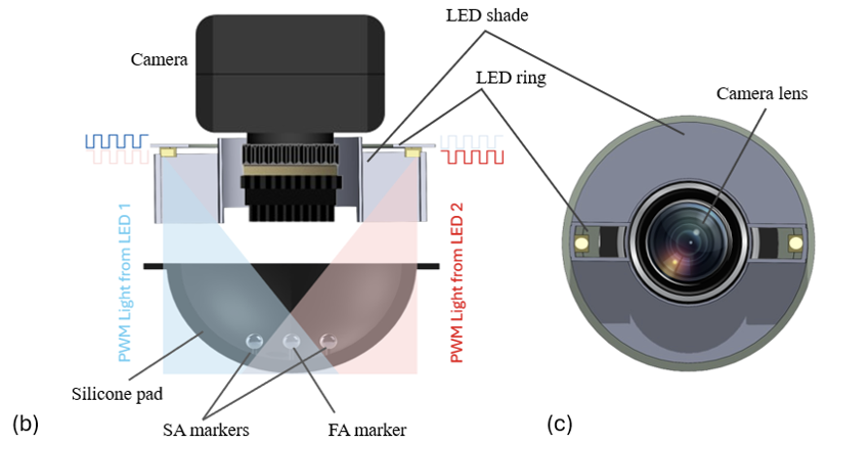
The NeuroFeel sensor integrates slow-adaptive (SA) and fast-adaptive (FA) biomimetic features to capture constant and transient forces accurately. A soft hemispherical silicone pad with embedded reflective markers is at the center of the design, providing real-time spatial and temporal feedback. Event-based cameras are employed to track changes in marker positions, significantly reducing latency and memory usage compared to traditional frame-based cameras.
3. Directions
Further enhancements to the NeuroFeel system include optimizing the silicone tip to reduce buckling effects, improving calibration methods for shear forces and torsion, and miniaturizing the sensor for broader applications.
Technologies Used
- Event Based Camera DVS 356
- ROS Software for Event Based Cameras
- Silicone Markers
Project Gallery